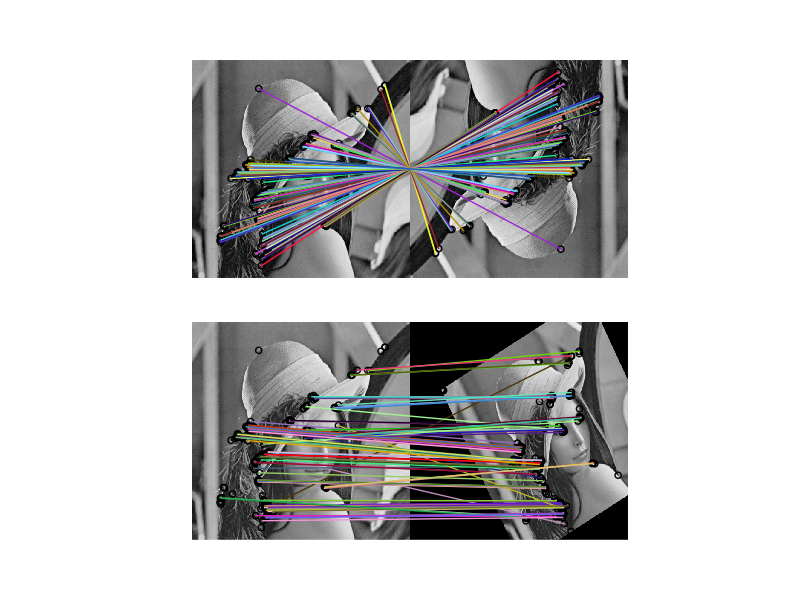
This example demonstrates the ORB feature detection and binary description algorithm. It uses an oriented FAST detection method and the rotated BRIEF descriptors.
Unlike BRIEF, ORB is comparatively scale- and rotation-invariant while still employing the very efficient Hamming distance metric for matching. As such, it is preferred for real-time applications.
from skimage import data
from skimage import transform as tf
from skimage.feature import (match_descriptors, corner_harris,
corner_peaks, ORB, plot_matches)
from skimage.color import rgb2gray
import matplotlib.pyplot as plt
img1 = rgb2gray(data.lena())
img2 = tf.rotate(img1, 180)
tform = tf.AffineTransform(scale=(1.3, 1.1), rotation=0.5,
translation=(0, -200))
img3 = tf.warp(img1, tform)
descriptor_extractor = ORB(n_keypoints=200)
descriptor_extractor.detect_and_extract(img1)
keypoints1 = descriptor_extractor.keypoints
descriptors1 = descriptor_extractor.descriptors
descriptor_extractor.detect_and_extract(img2)
keypoints2 = descriptor_extractor.keypoints
descriptors2 = descriptor_extractor.descriptors
descriptor_extractor.detect_and_extract(img3)
keypoints3 = descriptor_extractor.keypoints
descriptors3 = descriptor_extractor.descriptors
matches12 = match_descriptors(descriptors1, descriptors2, cross_check=True)
matches13 = match_descriptors(descriptors1, descriptors3, cross_check=True)
fig, ax = plt.subplots(nrows=2, ncols=1)
plt.gray()
plot_matches(ax[0], img1, img2, keypoints1, keypoints2, matches12)
ax[0].axis('off')
plot_matches(ax[1], img1, img3, keypoints1, keypoints3, matches13)
ax[1].axis('off')
plt.show()

STDOUT
STDERR
Python source code: download (generated using skimage 0.11dev)
IPython Notebook: download (generated using skimage 0.11dev)